Eco-driving with Learning Model Predictive Control
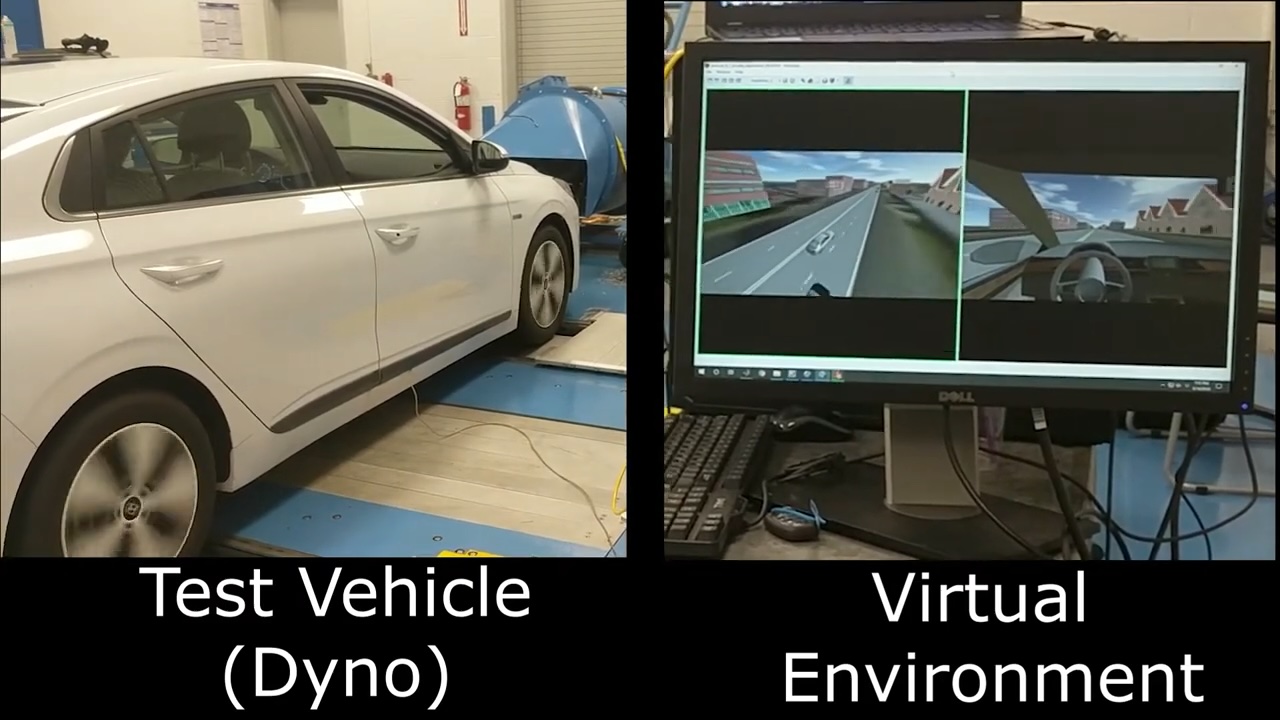
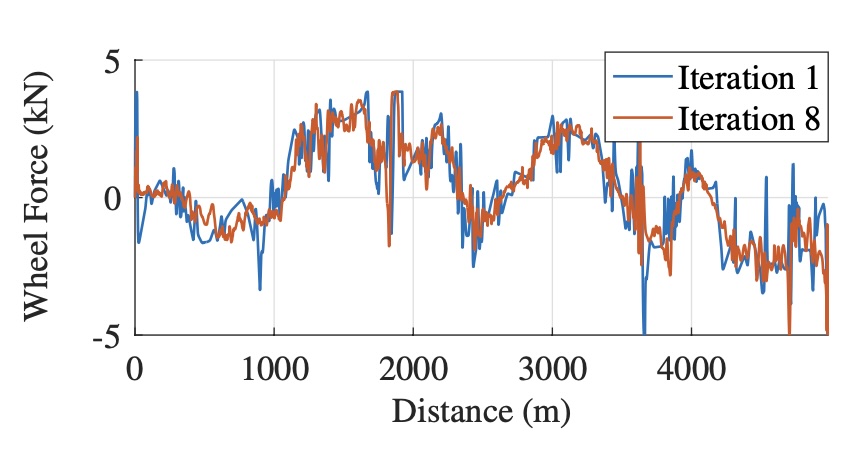
This research work uses Learning MPC for a predictive cruise controller which iteratively improves the fuel economy of a vehicle traveling along the same route every day. Our approach uses historical data from previous trip iterations to improve vehicle performance while guaranteeing a desired arrival time.